лендинг, который зарабатывает.
Разработаю правильный лендинг.
Дешевле, чем у студий.

Веб-Маркер
— это студия из одного человека. Потому что я дизайнер, программист, сео-специалист, копирайтер и маркетолог. Комплексно разрабатываю сайты
с 2010 года.
Разработаю для вас сочный лендинг, который оживит дело:
 приведет новых клиентов
приведет новых клиентов
повысит ваш престиж
увеличит доверие
поднимет доходы
РАСКРАСЬТЕ СВОЙ БИЗНЕС!

Работаю удаленно с любой точкой мира. Никакой волокиты и бюрократии.

НЕТ переплатам, потому что я не снимаю офис и не плачу уборщице и охране.

Общение напрямую со мной. Мы детально проработаем всю задачу.

Решаю задачи любой сложности, потому что у меня большой опыт.

Все этапы работы делаю лично. Никаких ошибок стыковки этапов.

Заключаю договор с поэтапной оплатой. Последняя оплата – за результат.

Не использую готовых шаблонов и конструкторов. Только эксклюзив.

Не бросаю клиентов, при необходимости остаюсь на сопровождении проекта.

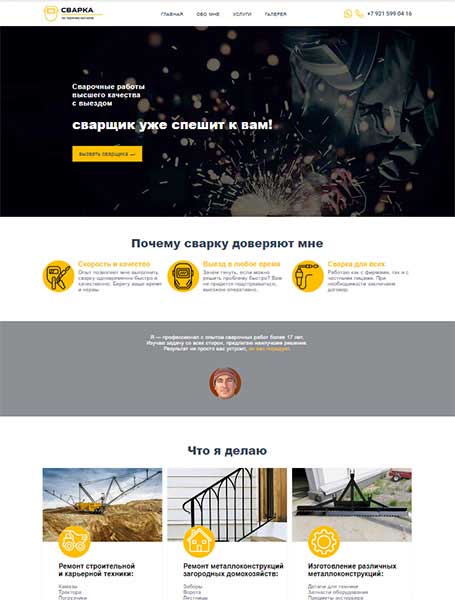
Пять блоков + API яндекс-карты и системы онлайн-записи.
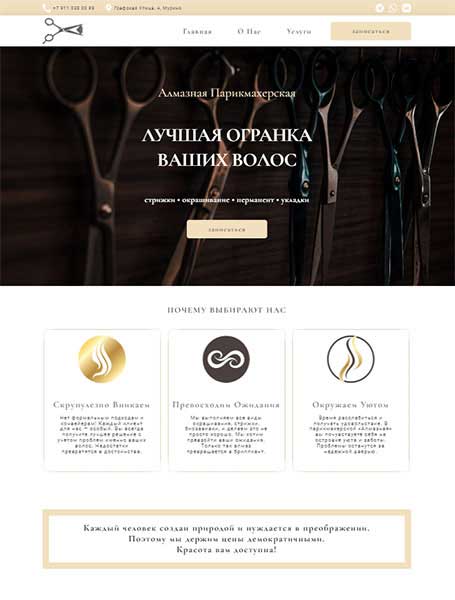

Небольшой лендинг из четырех блоков с каруселью работ.